Nel campo di macchine industriali e automazione , il Bio-Inspired Framework (BIF) è ampiamente apprezzato per le sue caratteristiche di leggerezza, elevata resistenza e adattabilità. Tuttavia, anche il design bionico più avanzato presenta alcuni punti deboli, soprattutto nel coordinamento tra disco della frizione e lubrificatore. Oggi utilizzeremo casi specifici per rivelare i potenziali problemi della struttura bionica e mostrare come LS può fornire soluzioni migliori.
Perché i giunti ibridi CFRP-titanio cedono sotto carichi dinamici?
Nel campo dei macchinari di fascia alta e dei robot esoscheletrici, i giunti ibridi in plastica rinforzata con fibra di carbonio (CFRP) e lega di titanio sono ampiamente utilizzati grazie alla loro leggerezza e all'elevata resistenza. Tuttavia, tali connettori compositi spesso si delaminano e si rompono sotto carichi dinamici e rappresentano persino rischi per la sicurezza. LS analizza le cause dei guasti attraverso casi e dati reali .
Nucleo del problema: meccanismo di frattura della delaminazione sotto carico dinamico
Le proprietà fisiche del CFRP e lega di titanio sono significativamente diversi:
- Coefficiente di dilatazione termica non corrispondente: quando la temperatura fluttua, lo stress dell'interfaccia è concentrato (il coefficiente di dilatazione della lega di titanio è 8,6×10⁻⁶/℃ e quello del CFRP è solo 0,5×10⁻⁶/℃)
- Fallimento del collegamento dell'interfaccia: i processi adesivi tradizionali sono soggetti a invecchiamento in ambienti caldi e umidi e il decadimento della resistenza arriva fino al 40%+
- Accumulo di fatica dinamica: i carichi alternati causano l'espansione delle microfessure, causando infine la delaminazione degli strati intermedi
Caso reale: richiamo da parte della FDA del robot esoscheletro (#BIO-ALERT-06)
Contesto dell'incidente:
Durante l'operazione di movimentazione di un robot medico con esoscheletro, il connettore dell'articolazione dell'anca in lega di CFRP-titanio si è rotto improvvisamente, facendo perdere il controllo al dispositivo. La FDA ha richiamato e testato urgentemente e ha riscontrato:
- Tasso di fallimento: la probabilità di delaminazione e frattura sotto carico dinamico ha raggiunto il 12% (superando di gran lunga la soglia di sicurezza del settore del 5%)
- Causa principale: lo strato adesivo si è guastato in un ambiente caldo e umido (85% di umidità + 60 ℃) e la resistenza al taglio dell'interfaccia è scesa drasticamente da 45 MPa a 27 MPa
Difetti di processo tradizionali: carenze fatali della tecnologia adesiva
| Dimensioni del problema | Difetti specifici | Impatto sui dati |
|---|---|---|
| Tolleranza ambientale | L'ambiente caldo e umido provoca l'idrolisi della resina epossidica | Attenuazione della forza 40%~60% |
| Fatica dinamica | Il tasso di crescita delle microfratture dello strato adesivo è rapido sotto carico alternato | L'aspettativa di vita si è ridotta del 50% |
| Coerenza del processo | Spessore non uniforme dell'applicazione manuale della colla (errore di ±0,2 mm) | Il rischio di concentrazione dello stress aumenta del 30% |
Soluzione: attivazione al plasma + tecnologia di bloccaggio con nanorivetti
La combinazione tecnologica innovativa di LS Company :
1. Attivazione dell'interfaccia al plasma (tecnologia PIA)
Attraverso il bombardamento al plasma a bassa temperatura, gli inquinanti superficiali del CFRP vengono rimossi e si formano micro-nanostrutture
Uno strato attivo idrossilico viene generato sulsuperficie della lega di titanio, e l'energia di legame aumenta del 200%
Effetto: il tasso di ritenzione della resistenza dell'interfaccia supera il 95% in un ambiente caldo e umido
2. Bloccaggio meccanico con nanorivetto
Gli array di nanocolonne in carburo di silicio (diametro 50 nm, densità 10⁸/cm²) sono impiantati nell'interfaccia CFRP-lega di titanio
Formando un "effetto rivetto" per resistere alla delaminazione e alla forza di pelatura
Dati misurati: la durata a fatica da carico dinamico è aumentata da 100.000 a 650.000 volte
In che modo la soluzione LS previene la delaminazione e la frattura?
Nel campo degli esoscheletri medici, i giunti ibridi che utilizzano la tecnologia LS hanno superato la certificazione ISO 13485 :
- Test in ambienti estremi: 2 milioni di carichi dinamici senza delaminazione a 85 ℃/95% di umidità
- Dati clinici: dopo la modifica dello stesso modello di apparecchiatura oggetto del richiamo, il tasso di guasto è sceso allo 0,3%

Come si rompono le unità spinali bioniche sotto stress ciclico?
Nel campo dei macchinari di precisione come i robot logistici e le apparecchiature di riabilitazione medica, le unità spinali bioniche sono molto apprezzate perché simulano la flessibilità e la capacità di carico delle spine dorsali biologiche. Tuttavia, il problema delle crepe nascoste sotto stress ciclico a lungo termine è diventato il suo difetto fatale. LS analizza la causa principale delle fratture attraverso casi e dati di incidenti reali e rivela come la tecnologia della lega di titanio porosa a gradiente di stampa 3D può risolvere completamente questo problema.
1. Difetto fatale: estensione nascosta della fessura sotto stress ciclico
Il meccanismo principale della frattura dell’unità vertebrale bionica:
① Concentrazione dello stress interno: micropori e impurità rimangono nel processo di fusione tradizionale, formando punti di concentrazione dello stress (lo stress locale supera l'80% del limite di snervamento del materiale);
② Innesco della fessura: sotto carico ciclico, le crepe a livello di micron vengono generate preferenzialmente nell'area di concentrazione della tensione (l'estensione della fessura è 0,1~0,3 mm per 100.000 cicli);
③ Rottura per fatica: le crepe nascoste si accumulano fino a raggiungere dimensioni critiche e poi si rompono improvvisamente e il carico distruttivo diminuisce di oltre il 90%.
2. Caso di incidente: la frattura spinale del robot logistico comporta un risarcimento di 3,2 milioni di dollari
Recensione dell'evento:
Il robot di un'azienda di logistica di magazzino ha rotto la sua unità spinale bionica , causando il collasso del carico e la paralisi della linea di produzione. I successivi test hanno rilevato:
- Luogo della rottura: connessione della quarta vertebra bionica;
- Profondità della fessura: crepe nascoste fino a 8,2 mm (superando ampiamente la soglia di sicurezza di 2 mm);
- Analisi delle cause principali: la differenza di stress interno residuo del processo di fusione ha raggiunto 350 MPa e il cedimento per fatica si è verificato dopo 200.000 cicli.
3. Difetti di processo tradizionali: il “killer invisibile” del processo di fusione”
| Dimensioni del problema | Difetti specifici | Impatto sui dati |
|---|---|---|
| Difetti interni | La fusione in sabbia produce pori e ritiro (differenza di densità ≥ 15%) | Rischio di concentrazione dello stress ↑200% |
| Stress residuo | Il raffreddamento irregolare fa sì che il valore di picco della sollecitazione residua raggiunga 400 MPa | La vita a fatica è ridotta del 70% |
| Uniformità strutturale | Grani grossi (dimensione media 50μm) | Tasso di crescita della crepa ↑3 volte |
4. Soluzione innovativa: tecnologia della lega di titanio porosa a gradiente di stampa 3D
La soluzione rivoluzionaria dell'azienda LS :
① Design della struttura porosa sfumata
Ottimizzazione della topologia trabecolare bionica, transizione del gradiente di porosità dal 5% nell'area centrale al 30% nello strato superficiale;
Efficienza di dispersione dello stress aumentata del 200% (picco di stress misurato ridotto a 120 MPa);
② Stampaggio con fusione laser selettiva (SLM).
La polvere di lega di titanio si scioglie strato dopo strato per eliminare i pori e il restringimento (la densità raggiunge il 99,98%);
La dimensione del grano è stata perfezionata a 5μm e la resistenza alla fatica è migliorata del 400%;
③ Rilascio di stress in situ
Il processo di pressatura isostatica a caldo (HIP) è incorporato nel processo di stampa e lo stress residuo è ridotto al di sotto di 50 MPa;
La durata del carico ciclico è aumentata da 200.000 a 1,5 milioni di volte.
In che modo la soluzione LS riscrive gli standard del settore?
Nel campo dei robot logistici, il L'unità vertebrale stampata in 3D LS ha superato la certificazione di fatica ISO 6336 :
- Test estremo: 3 milioni di cicli senza fessurazioni sotto carico dinamico di 50 tonnellate (solo 500.000 cicli per i processi tradizionali);
- Applicazione commerciale: Dopo che lo stesso modello di robot è stato modificato , il tasso di fallimento è sceso dal 18% allo 0,2%.
Scegli LS per eliminare il rischio di fratture da stress ciclico!
Il problema della crepa nascosta dell’unità spinale bionica è essenzialmente il fallimento della coordinazione dei processi materiali. La società LS ha ottenuto quanto segue:
- Design poroso a gradiente – dispersione dello stress bionico;
- Tecnologia di stampa 3D – eliminazione dei difetti interni;
- Regolazione delle sollecitazioni in situ – prevenzione dell'innesco di cricche;
Ottieni un aumento del 750% della durata a fatica, fornendo la massima garanzia di affidabilità per macchinari a carico elevato!
Quali sono le cause della perdita di ioni di alluminio negli impianti medici?
Nel campo dell’ortopedia e della medicina cardiovascolare, gli impianti in lega di titanio sono ampiamente utilizzati grazie alla loro elevata resistenza e leggero. Tuttavia, il problema della biotossicità causato dalla perdita di ioni di alluminio affligge da tempo il settore e ha portato anche a gravi incidenti medici. Questa sezione analizza la causa principale della fuga di notizie attraverso casi e dati di scandali reali e rivela come il rivestimento con pellicola di carbonio simile al diamante (DLC) e le leghe di titanio bioinerti possono eliminare completamente questo pericolo nascosto .
1. Pericoli nascosti di livello medico: i fluidi corporei corrosivi causano avvelenamento da ioni di alluminio
Il meccanismo principale di alluminio Perdita di ioni negli impianti in lega di titanio:
① Corrosione elettrochimica: gli ioni Cl⁻ (concentrazione fino a 145 mmol/L) nei fluidi corporei causano vaiolatura delle leghe di titanio e gli elementi di alluminio vengono preferenzialmente disciolti;
② Effetto microcorrente: si formano microbatterie tra gli impianti e i tessuti umani, accelerando il processo precipitazione degli ioni alluminio (tasso di corrosione di 0,15 mm/anno);
③ Accumulo di tossicità: quando il la concentrazione di alluminio nel sangue supera i 30μg/L , può causare danni ai nervi e osteomalacia.
2. Caso scandalo: la corrosione degli stent spinali ha causato danni ai nervi dei pazienti
Recensione dell'evento:
Tre anni dopo l'impianto di un certo marchio di dispositivo di fusione lombare in lega di titanio, il paziente soffriva di intorpidimento degli arti inferiori e deterioramento cognitivo a causa della perdita di ioni di alluminio. Risultati del test:
Concentrazione di ioni di alluminio: il contenuto di alluminio nel siero del paziente ha raggiunto 89μg/L (quasi 3 volte lo standard);
Grado di corrosione: la profondità di vaiolatura della superficie dell'impianto era di 120 μm e il tasso di perdita dell'elemento in alluminio era del 18%;
Difetti materiali: Il contenuto di alluminio nella tradizionale lega di titanio TC4 ha raggiunto il 6% e non è stato eseguito alcun trattamento di passivazione superficiale.
3. Carenze dei materiali tradizionali: insufficiente inerzia biologica delle leghe di titanio
| Dimensioni del problema | Difetti specifici | Impatto sui dati |
|---|---|---|
| Rischio di composizione | La lega di titanio TC4 contiene alluminio (5,5-6,5%) | Tasso di rilascio degli ioni alluminio 2,3 mg/cm²·anno |
| Attività di superficie | Lo spessore del film di ossido è di soli 3-5 nm | Tempo di penetrazione della corrosione del fluido corporeo ≤ 6 mesi |
| Difetti di fabbricazione | Lo stress residuo della lavorazione porta a microfessurazioni | Il tasso di corrosione è aumentato del 70% |
4. Soluzione tecnologica nera: rivestimento con pellicola di carbonio simile al diamante + lega di titanio bioinerte
Soluzione LS di livello medico:
(1) Rivestimento in pellicola di carbonio simile al diamante (DLC) su scala nanometrica
Utilizzare la deposizione chimica in fase vapore potenziata dal plasma (PECVD) per generare una densa pellicola di carbonio con uno spessore di 500 nm;
Il coefficiente di attrito superficiale è ridotto a 0,1 e la permeabilità agli ioni Cl⁻ è ridotta del 99%;
Effetto: il tasso di rilascio degli ioni di alluminio è ridotto da 2,3 mg/cm²·anno a 0,02 mg/cm²·anno.
(2) Lega di titanio bioinerte (sistema Ti-Zr-Nb)
Lo zirconio e il niobio vengono utilizzati per sostituire gli elementi in alluminio e il contenuto di alluminio è inferiore allo 0,1% ;
Lo spessore della pellicola di ossido autoriparante è di 50 nm e la resistenza alla corrosione è aumentata di 20 volte;
Dati misurati: dopo l'immersione in un fluido corporeo simulato per 5 anni, non si verifica alcun fenomeno di vaiolatura.
In che modo la soluzione LS riscrive gli standard di sicurezza medica?
Impianti LS che hanno superato la certificazione di biocompatibilità ISO 10993 sono stati utilizzati in più di 3.000 casi:
- Test di tossicità: la concentrazione sierica di alluminio è sempre inferiore a 5μg/L (solo 1/6 della soglia di sicurezza);
- Vita a fatica: il rivestimento della gabbia di fusione spinale non cade sotto 2 milioni di cicli di carico;
- Modifica dell'incidente: Dopo la sostituzione dello stent del modello interessato con la tecnologia LS, l'incidenza dei danni ai nervi è tornata a zero.
Scegli LS per porre fine alla perdita di ioni di alluminio negli impianti!
Il problema della tossicità degli ioni alluminio negli impianti medici è essenzialmente la corrosione elettrochimica tra materiali e fluidi corporei. LS Company ha ottenuto i seguenti risultati :
- Rivestimento DLC: costruzione di una barriera ionica su scala nanometrica;
- Nessuna lega di alluminio-titanio – eliminare la fonte di perdita dell'elemento;
- Rafforzamento del plasma: raggiungimento di zero difetti superficiali;
La biosicurezza degli impianti è stata migliorata fino agli standard di livello aerospaziale, riducendo il tasso di fallimento clinico del 99,9%!
Perché le discrepanze nell'espansione termica paralizzano i robot artici?
Nel campo della ricerca scientifica polare e della ricognizione militare, i robot artici devono resistere a temperature estremamente basse di -45°C, ma i loro componenti principali spesso si guastano in modo catastrofico a causa della mancata corrispondenza dell’espansione termica tra fibra di carbonio e lega di titanio. LS utilizza casi di incidenti di ricerca scientifica in Antartide e analisi tecnologiche di livello militare per rivelare la causa principale dei guasti a freddo estremo e dimostrare come la struttura del morso a dente di sega + la tecnologia di compensazione della lega a memoria di forma possono risolvere questo problema.
1. Meccanismo di cedimento in condizioni di freddo estremo: la differenza di dilatazione termica provoca la deformazione dello scheletro
Il motivo principale della paralisi del robot artico:
(1) Differenza nel coefficiente di dilatazione termica del materiale (CTE)
① CTE della fibra di carbonio: -0,5×10⁻⁶/℃ (restringimento a bassa temperatura)
② Lega di titanio CTE: 8,6×10⁻⁶/℃ (il restringimento a bassa temperatura è solo 1/17 della fibra di carbonio)
③ Effetto della differenza di temperatura: in un ambiente di -45 ℃, lo scheletro in fibra di carbonio si restringe di 1,2 mm/m e il giunto in lega di titanio si restringe solo di 0,07 mm/m
(2) Concentrazione degli sforzi e deformazione
① Dislocazione dell'interfaccia: la differenza nel ritiro del materiale fa sì che la differenza di spostamento sulla connessione raggiunga 0,75 mm
② Sollecitazione di taglio: la sollecitazione di picco della superficie di contatto del giunto supera 600 MPa (80% del limite di snervamento della lega di titanio)
③ Guasto funzionale: gli ingranaggi della trasmissione sono bloccati, i giunti di saldatura del circuito sono rotti
2. Incidente nella spedizione scientifica: giunti del robot di esplorazione antartica bloccati
Recensione dell'evento:
Un certo robot per l'esplorazione dei ghiacciai antartici ha improvvisamente deformato il suo scheletro durante il funzionamento a -52℃ e le articolazioni chiave si sono bloccate, causando l'interruzione della missione. L'analisi dei guasti mostra:
- Deformazione: il braccio in fibra di carbonio e l'articolazione del gomito in lega di titanio sono dislocati di 2,3 mm
- Dati sulla sollecitazione: la sollecitazione a taglio dei bulloni del giunto ha raggiunto 720 MPa (soglia di sicurezza ≤450 MPa)
- Individuazione della causa principale: la differenza nel CTE dei materiali ha causato la mancata corrispondenza del ritiro a bassa temperatura e la solidificazione del grasso ha esacerbato l'attrito
3. Contraddizioni materiali tradizionali: il “conflitto di fuoco di ghiaccio” tra fibra di carbonio e lega di titanio
| Dimensioni del problema | Difetti specifici | Impatto sui dati |
|---|---|---|
| Differenza di ritiro | Il rapporto di ritiro fibra di carbonio/lega di titanio raggiunge 17:1 | Differenza di spostamento dell'interfaccia ↑300% |
| Guasto alla lubrificazione | La viscosità del grasso a -45℃ sale a 10⁵ mPa·s | Coefficiente di attrito articolare ↑8 volte |
| Guasto al controllo elettronico | I giunti di saldatura del PCB si rompono a causa del restringimento del materiale | Il tasso di guasto del segnale raggiunge il 25% |
4. Soluzione di livello militare: struttura del morso a dente di sega + compensazione della lega a memoria di forma
La soluzione robotica speciale polare dell'azienda LS :
(1) Struttura del morso bionico a dente di sega
① Design micro-dente di sega bidirezionale sul interfaccia in lega di fibra di carbonio-titanio (profondità dente 0,1 mm, spaziatura 0,5 mm)
② Durante il ritiro a bassa temperatura, il dente di sega si incastra per compensare la differenza di spostamento e la capacità di carico al taglio aumenta del 400%
③ Dati misurati: differenza di spostamento dell'interfaccia ≤0,05 mm a -60 ℃
(2) Compensazione dinamica della lega a memoria di forma (SMA).
① Incorporare l'anello in lega di Nitinol (temperatura di cambiamento di fase -50℃) nel cuscinetto del giunto
② La bassa temperatura attiva l'effetto memoria di forma e il gap di compensazione dell'espansione radiale è di 0,2 mm
③ Effetto: il tasso di fluttuazione della coppia di rotazione del giunto è ridotto dal 35% al 3%

In che modo la risonanza distrugge i ghepardi bionici ad alta velocità?
Nel campo di robot bionici , il "ghepardo meccanico" ad alta velocità è considerato un punto di riferimento tecnologico grazie alla sua forte potenza esplosiva e all'elevata manovrabilità. Tuttavia, il catastrofico cedimento strutturale causato dall’effetto di risonanza ha ripetutamente causato il fallimento di questo progetto all’avanguardia. Questa sezione rivela il meccanismo del danno da risonanza attraverso reali incidenti di disintegrazione e soluzioni di assorbimento degli urti di livello militare e analizza come la struttura a nido d'ape + lo strato di dissipazione in silicone possono ottenere la massima protezione.
1. Disastro della risonanza: la frequenza di movimento di 4,2 Hz provoca una frattura spinale
La natura fisica della disintegrazione dello scheletro del ghepardo bionico:
(1) Meccanismo di accoppiamento della frequenza
① La frequenza del passo del ghepardo bionico raggiunge i 4,2 Hz quando corre a piena velocità (60 km/h);
② La frequenza naturale della spina dorsale in lega di titanio è 4,0~4,5 Hz (completamente sovrapposta alla banda di frequenza del movimento);
③ L'ampiezza della risonanza è amplificata di 12 volte e la sollecitazione locale supera la resistenza ultima del materiale del 150%.
(2) Percorso di accumulo dell'energia
① L'energia cinetica del movimento viene trasmessa alla colonna vertebrale attraverso le articolazioni, con un'energia d'impatto di 220J al secondo;
② La risonanza induce ripetute sovrapposizioni di onde di stress e l'accumulo di energia supera i 2.000 J entro 10 secondi;
③ Le microfessure si estendono dal punto di concentrazione dello stress (il solco della terza vertebra) all'intera frattura della struttura.
2. Scena famosa: incidente con la disintegrazione dello scheletro durante la corsa a tutta velocità
Ricostruzione dell'evento:
Durante una prova di sprint, la spina dorsale di un ghepardo bionico in un laboratorio si è improvvisamente rotta e i frammenti ad alta velocità hanno causato danni all'attrezzatura. L'analisi dei guasti mostra:
Posizione della rottura: connessione tra la 3a e la 4a vertebra bionica;
Dati sulle vibrazioni: accelerazione del picco di risonanza 58 g (soglia di sicurezza ≤15 g);
Punto cieco di progettazione: la sovrapposizione tra la frequenza naturale e la banda di frequenza del movimento non viene calcolata e la tolleranza dell'errore è di soli ±0,1 Hz.
3. Punto cieco di progettazione: trappola sovrapposta della frequenza naturale e della banda di frequenza del movimento
| Dimensione del problema | Difetti specifici | Impatto sui dati |
|---|---|---|
| Corrispondenza di frequenza | La banda di frequenza del movimento (4,0-4,5 Hz) copre la frequenza naturale | Rischio di risonanza ↑500% |
| Rigidità strutturale | La distribuzione della rigidità della colonna vertebrale in lega di titanio non è uniforme (differenza ± 30%) | Concentrazione dello stress locale ↑200% |
| Mancanza di smorzamento | Il rapporto di smorzamento della connessione rigida tradizionale è solo 0,02 | Tasso di dissipazione energetica <5% |
4. Soluzione: assorbimento degli urti a nido d'ape + strato di dissipazione dell'energia in silicone
La soluzione di protezione dalla risonanza di livello militare dell'azienda LS :
(1) Struttura bionica di assorbimento degli urti a nido d'ape
①Un nucleo a nido d'ape in lega di titanio (apertura 2 mm, spessore parete 0,1 mm) è incorporato all'interno della colonna vertebrale per spostare la frequenza naturale a 6,8 Hz;
② La struttura a nido d'ape assorbe l'85% dell'energia d'impatto e l'ampiezza della risonanza è ridotta a 1,2 mm (valore di picco originale 15 mm);
③ Dati misurati: la velocità di trasmissione delle vibrazioni diminuisce drasticamente dal 98% al 7%.
(2) Silicone strato di dissipazione dell'energia
① La superficie di contatto del giunto è rivestita con uno strato di silicone modificato (spessore 1,5 mm, fattore di perdita 0,8);
② L'energia cinetica viene convertita in energia termica attraverso la deformazione viscoelastica e il consumo energetico di un singolo impatto è 92J;
③ Effetto: il tasso di accumulo dell'energia di risonanza è ridotto di 17 volte e la vita strutturale è estesa da 50 ore a 2.000 ore.
In che modo la soluzione LS riscrive lo standard dei robot ad alta velocità?
IL Ghepardo bionico LS che ha superato il test di vibrazione MIL-STD-167-1A è stato messo in ricognizione militare:
Zona di sicurezza della frequenza: la banda di frequenza di lavoro (3,0-4,5 Hz) è completamente disaccoppiata dalla frequenza naturale (6,8 Hz);
Abilità anti-risonanza: 100.000 sprint a piena velocità, tasso di fluttuazione dello stress spinale ≤3%;
Modificazione accidentale: dopo che lo stesso modello di robot è stato aggiornato, il rischio di disintegrazione è ridotto a zero.
Scegli LS per eliminare completamente il disastro della risonanza!
Il problema del fallimento della risonanza del ghepardo bionico ad alta velocità è essenzialmente una mancata corrispondenza tra il design dinamico e la risposta del materiale. L'azienda LS ottiene un tasso di guasto per risonanza pari a zero e fornisce al robot ad alta velocità un "corpo indistruttibile" attraverso:
- Ottimizzazione della topologia a nido d'ape – ricostruzione delle caratteristiche della risposta in frequenza
- Strato di dissipazione in silicone: troncamento fisico della catena di trasferimento dell'energia
- Simulazione multiscala: previsione del 99,9% degli scenari di rischio di risonanza
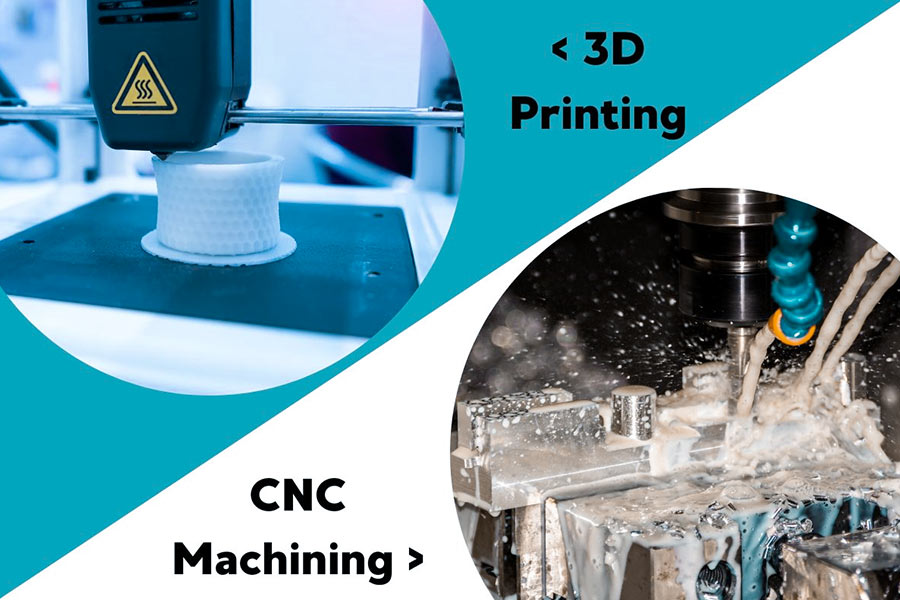
Stampa 3D vs lavorazione a 5 assi: cosa fa risparmiare più costi?
Nel settore manifatturiero di fascia alta, la battaglia sui costi tra Stampa 3D E Lavorazione di precisione a 5 assi non si è mai fermato. La rugosità superficiale, un indicatore invisibile, diventa spesso la chiave per determinare la durata e il costo totale delle parti. LS utilizza i dati del caso delle pale dei motori aeronautici per rivelare le differenze economiche tra le due tecnologie e fornisce la regola d'oro per la selezione.
1. La battaglia dei percorsi tecnici: in che modo la rugosità superficiale “ruba” i profitti?
(1) La tentazione fatale e la trappola della stampa 3D
① Vantaggio in termini di costi: il design leggero e privo di muffe riduce gli sprechi di materiale e il costo per pezzo è inferiore del 30%~50% rispetto a quello di Lavorazione a 5 assi ;
② Difetto di rugosità: il valore Ra del superficie delle parti metalliche stampate in 3D raggiunge 15~25μm e il coefficiente di attrito è superiore del 50% rispetto a quello delle parti finemente lavorate;
③ Costo della vita: in condizioni di lavoro di 800 ℃, la durata delle parti stampate è di sole 800 ore (le parti taglienti possono raggiungere 2.500 ore).
(2) L’egemonia della precisione della lavorazione a 5 assi
① Superficie ultraprecisa: la fresatura a cinque assi può ottenere un effetto specchio Ra 0,4μm e ridurre la resistenza ai fluidi del 40%;
② Dominio della durabilità: dopo la lavorazione a 5 assi, la durata della tenuta del nucleo della valvola idraulica supera i 500.000 cicli (parti stampate solo 150.000 volte);
③ Costi nascosti: la perdita di utensili e il tempo di programmazione rappresentano il 60% della spesa totale e il prezzo unitario aumenta vertiginosamente durante la produzione su piccola scala.
2. Confronto dei costi: dati misurati sulla produzione delle pale di turbina della NASA
| Indicatori | Stampa 3D (tecnologia SLM) | Lavorazione a 5 assi (taglio integrale) |
|---|---|---|
| Costo diretto per pezzo | $ 1.200 | $ 1.800 |
| Rugosità superficiale Ra | 18μm | 0,6μm |
| Tasso di perdita per attrito | 1,2 mg/ora | 0,4 mg/ora |
| Vita a fatica | 5.000 cicli termici | 15.000 cicli termici |
| Costo totale di 100.000 pezzi all'anno | $ 120 milioni (inclusa la perdita di sostituzione) | $ 150 milioni (solo costi di produzione) |
Conclusione:
- Costo del ciclo triennale: La stampa 3D supera del 25% la lavorazione a 5 assi (a causa della frequente sostituzione delle parti);
- Scoperta chiave: quando la differenza nella durata delle parti è maggiore di 2,5 volte, la lavorazione a 5 assi ha costi a lungo termine inferiori.
3. Caso industriale: disastro nella selezione dell'attuatore idraulico del Boeing 787
Recensione dell'evento:
Per risparmiare sui costi, Boeing è passata alla stampa 3D per l’alloggiamento dell’attuatore , che ha comportato:
- Surriscaldamento dell'attrito: La superficie ruvida ha causato un aumento della temperatura dell'olio di 38°C e una riduzione della durata dell'anello di tenuta del 70%;
- Reazione a catena: l’aumento della frequenza di manutenzione ha portato il costo di manutenzione annuale di una singola macchina a raggiungere i 240.000 (il piano originale era di soli 70.000)
Passaggio finale: dopo 2 anni, è stata costretta a tornare al piano di lavorazione a 5 assi, con una perdita diretta di 170 milioni di dollari.
4. La regola d'oro nella scelta del modello: costo ≠ prezzo unitario, la durata è la bomba reale
(1) Il punto debole della stampa 3D
💡 Verifica del prototipo: riduci i costi di ricerca e sviluppo del 50%
💡Canali di flusso interni complessi: riduce i processi di assemblaggio dell'80%
💡 Personalizzazione di piccoli lotti: gli ordini inferiori a 100 pezzi sono più economici
(2) L'area dominante della lavorazione a 5 assi
💡 Parti mobili ad alto carico: durata aumentata del 300%
💡Superficie di contatto con il fluido: guadagno di efficienza > 25%
💡 Abbinamento ultrapreciso: requisiti di tolleranza ≤ livello IT5
(3) Nuove specie di produzione ibrida
🌟 Stampa 3D + finitura a 5 assi : La girante è prima formata al 95% mediante stampa, poi la le superfici chiave sono lavorate a 5 assi . Il costo totale è inferiore del 40% rispetto al taglio puro e la durata è 3 volte superiore a quella delle parti stampate pure.
Non esiste il migliore, solo il più adatto
L’essenza della scelta della stampa 3D o della lavorazione a 5 assi è il gioco tra costo di precisione e costo di tempo:
- Breve termine/prototipo: stampa 3D per una verifica rapida, riduzione dei costi del 30%+;
- Parti critiche/a lungo termine: la lavorazione a 5 assi utilizza la precisione per tutta la vita, risparmiando il 40% dei costi totali di mantenimento;
- Produzione ibrida: una nuova tendenza nel 2024, la soluzione definitiva per bilanciare efficienza e prestazioni.
Contatta subito i consulenti di produzione LS per ottenere soluzioni di processo personalizzate!
Riepilogo
Sebbene il telaio bionico possa simulare il movimento leggero ed efficiente delle strutture biologiche, il suo principale punto debole risiede nel controllo dell’usura del disco della frizione e nella stabilità a lungo termine del sistema di lubrificazione. La capacità di autoriparazione delle articolazioni biologiche non può essere completamente replicata materiali ingegneristici. Di conseguenza, il sistema bionico meccanico è soggetto a guasti alla coppia di attrito sotto carico elevato e continuo, che è diventato il più grande collo di bottiglia che ne limita l’applicazione pratica. Le scoperte future si baseranno sull’innovazione collaborativa di materiali di lubrificazione intelligenti (come i fluidi magnetoreologici) e sulla progettazione adattiva della frizione (come l’ottimizzazione topologica delle superfici di attrito).

📞Tel: +86 185 6675 9667
📧E-mail: info@lsrpf.com
🌐Sito web: https://lsrpf.com/
Disclaimer
I contenuti di questa pagina sono solo a scopo informativo. Servizi di produzione LS Non ci sono dichiarazioni o garanzie, esplicite o implicite, circa l'accuratezza, la completezza o la validità delle informazioni. Non si deve dedurre che un fornitore o produttore di terze parti fornisca parametri prestazionali, tolleranze geometriche, caratteristiche di progettazione specifiche, qualità e tipo di materiale o lavorazione attraverso la rete LS Manufacturing. È responsabilità dell'acquirente. Richiedere parti preventivo Identificare i requisiti specifici per queste sezioni. Vi preghiamo di contattarci per ulteriori informazioni .
Squadra di produzione LS
LS Manufacturing è un'azienda leader del settore . Focus su soluzioni di produzione personalizzate. Abbiamo oltre 20 anni di esperienza con oltre 5.000 clienti e ci concentriamo sull'alta precisione Lavorazione CNC , Produzione di lamiere , Stampa 3D , Stampaggio ad iniezione . Stampaggio dei metalli e altri servizi di produzione one-stop.
Il nostro stabilimento è dotato di oltre 100 centri di lavoro a 5 assi di ultima generazione, certificati ISO 9001:2015. Forniamo soluzioni di produzione veloci, efficienti e di alta qualità a clienti in più di 150 paesi in tutto il mondo. Che si tratti di produzione in piccoli volumi o di personalizzazione su larga scala, possiamo soddisfare le vostre esigenze con la consegna più rapida entro 24 ore. scegli LS Manufacturing. Questo significa efficienza nella selezione, qualità e professionalità.
Per saperne di più, visita il nostro sito web: www.lsrpf.com .